당사에서 사용하지 않는 PIN은 보드에
Header Pin으로 구형을 하였습니다. 사용하고 하시는 pin 을 회로에서 검색하여
사용하시면 될 것 같습니다.
<I2C>

I2C는 아래를 참고하시면 도움이 될 것 같습니다.
PATH: /kernel/arch/arm/mach-exynos
FILE: mach-smdk4x12.c
static struct i2c_board_info i2c_devs0[] __initdata = {
#ifdef CONFIG_SND_SOC_WM1800
{
I2C_BOARD_INFO("wm1800", 0x1a), },
………………….
#endif
&s3c_device_wdt,
&s3c_device_rtc,
&s3c_device_i2c0,
&s3c_device_i2c1,
&s3c_device_i2c2,
&s3c_device_i2c3,
&s3c_device_i2c4,
&s3c_device_i2c5,
&s3c_device_i2c7,
위에 사용하고자 하는 I2C를 추가합니다.
PATH: /kernel/arch/arm/mach-exynos
FILE: setup-i2c0.c / setup-i2c4.c / setup-i2c5.c
위 소스를 참고하여 소스를 작성하시면 될 것 같습니다.
<SPI>
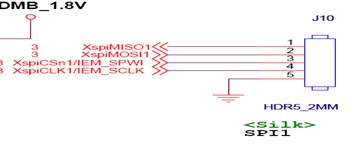
SPI도 I2C와 마찬가지로 진행하시면 됩니다.







































 회원정보
회원정보 미니박스
미니박스 메일
메일 쪽지
쪽지 문자
문자 채팅
채팅 포스트
포스트 댓글
댓글 친구맺기
친구맺기 친구제외
친구제외 방명록
방명록 선물하기
선물하기 파일박스
파일박스 홈페이지
홈페이지